AGV小车可根据企业生产的不同需求,以不同的组合,快捷地与各类生产线、装配线等有机结合,进而实现各种不同的功能。旨在最大限度地,缩短物流周转周期,降低物料的周转消耗。完善的安全防护能力使它具有智能化的交通管理,安全避碰,多级警示功能并能够在许多不适宜人类工作的场合,发挥独特作用。





产品特点

成本较低

体积较小

重量较轻
通道宽度小
和操作人员对接时,更便于拣货
产品特点
压缩通道面积,提升存储空间
系统容错率高,保障供应链可持续,业务不中断

方案建设周期短,上线速度快

模块化组件让安装和部署更加便捷

大幅节省拣选时间,将拣选效率提升达3倍

有效助力企业缓解成本压力
产品特点







产品特点
设备部署简单

高精度导航,持久续航能力
模块化设计满足多场景需求

完善的服务响应
产品特点

满足多种负载/载具的应用需求

快速的运行速度,满足生产节拍需求

智能的自动调度,路径规划和拥塞控制算法
适应人机混合的工作环境

无缝对接MES/WMS/ERP
产品特点
避障能力灵敏
身形小巧

具备高性能的激光与视觉融合的SLAM导航和多种辅助导航定位方式
标配360°激光导航及前后物理防撞条,支持低矮物体检测,人机混行场景运行
产品特点
270°激光雷达

充电10分钟,工作1小时;支持用户自定义充电时间及运行时间

激光Slam导航+反光板导航
双轮差速驱动
产品特点
产品特点

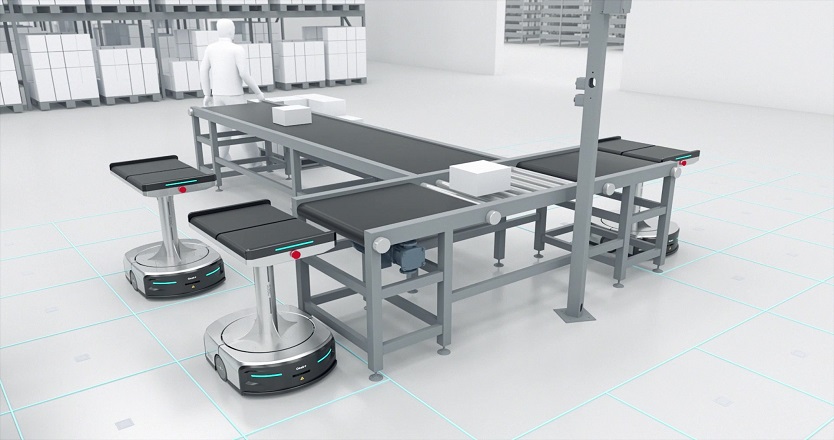
独立旋转的双皮带

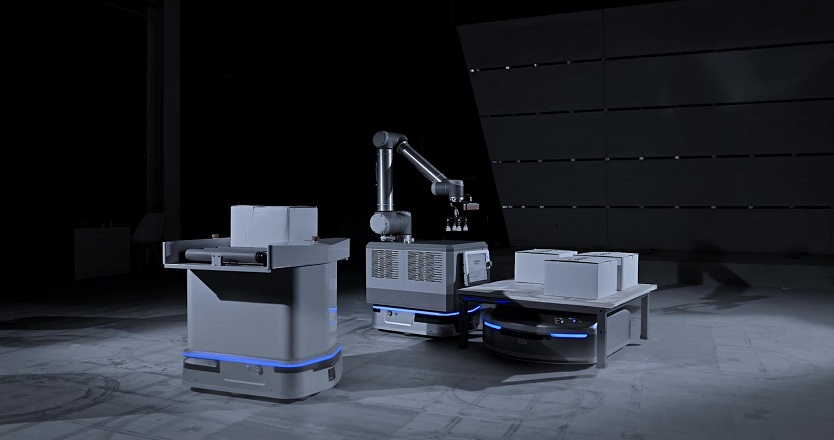
落地式全柔性智能分拣方案基于高度灵活
产品特点

自主定位导航,采用磁条导航技术实现精确定位

柔性运动控制,采用差速驱使,支持前进、后退、旋转等运动控制,运动过程平滑流畅

通过触摸屏+三色指示灯提示设备状态

多重安全防护,前/后激光避障,前/后急停按钮,前/后碰撞条等安全防护设计,实现安全可靠的运动控制

支持最大600kg货物移载搬运

支持上层机构利用多个传感器实现货物位置监测

无线网络通信:支持WIFI网络通信和无缝漫游,网络覆盖区域无障碍运
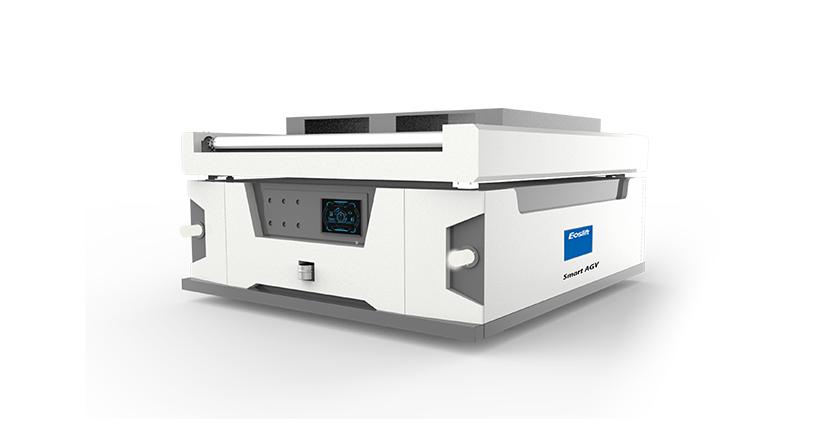
产品特点

自主定位导航,采用磁条导航技术实现精确定位

柔性运动控制,采用双舵轮驱动,支持全向行驶(前进、后退、旋转运动控制),运动过程平滑流畅

通过触摸屏+三色指示灯提示设备状态

多重安全防护,360°激光避障,前/后急停按钮,前/后碰撞条等安全防护设计,实现安全可靠的运动控制

支持最大1200kg货物移载搬运

支持上层机构利用多个传感器实现货物位置监测

无线网络通信:支持WIFI网络通信和无缝漫游,网络覆盖区域无障碍运
产品特点

自主定位导航,采用SLAM导航技术实现定位,二维码导航实现精确二次定位

柔性运动控制,采用双舵轮驱动,支持全向行驶(前进、后退、横移、旋转运动控制),运动过程平滑流畅

通过触摸屏+三色指示灯提示设备状态

多重安全防护,360°激光避障,前/后急停按钮,前/后碰撞条等安全防护设计,实现安全可靠的运动控制

支持最大2000kg货物举升、搬运、下放、举升、下放动作能精准同步

无线网络通信:支持WIFI网络通信和无缝漫游,网络覆盖区域无障碍运


产品特点

WIFI环境下实现无线通信

多机器人交互学习和信息融合

自主避障,自动充电
高精度二维码/SLAM导航
结构小型化,大荷载提升

锂电池超长续航
产品特点



产品特点

行驶速度高达3m/s

激光测距、自主避障

多机器人交互学习和信息融合

高速、高精度二维码视觉导航
产品特点
产品特点
首创的落地式分拣机器人
搭载前向激光雷达检测障碍物
侧向红外传感器判断投递容器装载量

灵活避障、弧线转弯
终点识别、准确投递
产品特点
导航模式
磅旗AGV系列产品均支持个性定制,同时可选择二维码导航、磁条导航、激光SLAM(有反、无反)三种导航方式
| 主流几款AGV导航模式对比 | ||||
|
|
二维码导航 | 磁条导航 | 激光导航(有反) | 激光导航(SLAM) |
| 使用场景 | 车间内部物流 | 车间内部物流 | 室内环境 | 室内环境相对固定 |
| 参照物 | 二维码 | 磁条+RFO | 反光板 | 无需布置,以周围环境为参照 |
| 定位精度 | ±10mm | ±10mm | ±10mm | ±10mm |
| 常规速度 | 0-45m/min | 0-40m/min | 0-72m/min | 0-72m/min |
| 优势 |
AGV定位精确,小巧灵活 铺设、改变路径较容易 便于控制通讯 对声光无干扰 |
AGV定位精确,路径的铺设/变更或扩张相对电磁导航较容易 磁条成本较低 在人机交互环境中利用激光避障能够较好的避让 |
AGV定位精确;地面无需其他定位设施 行驶路径可灵活多变,能够合适多种现场环境 它是目前国内外许多AGV生产厂家优先采用的先进导航方式 |
不需要对环境不知额外的设备,路线容易扩展 调度避让较为灵活 |
应用场景

月台搬运

原材料入库

原材料拣选

产线线体对接搬运

半成品库搬运及拣选

成品出库
优势

安全可靠
可装备多种声光报警系统,能通过车载障碍探测系统在碰撞到障碍物前自动停车

柔性程度高
具有高精度的工位识别和定位能力,方向灵活能与各种加工设备协调工作

充电自动化
自动管理需要充电的机器人与充电桩匹配和对接,保证所有的机器人电量都在70%,以提升电池的寿命

高效的工作效率
基于神经网络算法,实现路径不冲突整体优化最短最优路径,具有自主学习能力,可不断提升AGV的工作效率

